

ToF por ultrasonidos
El ToF ultrasónico o por ultrasonidos usa el sonido en lugar de la luz. Estos dispositivos sonares en miniatura emiten un sonido a frecuencias ultrasónicas y “escuchan” las posteriores reflexiones. El tiempo que tarda la reflexión en llegar al sensor se puede medir y esta medición se emplea para calcular la distancia al objeto.
Un sensor ToF ultrasónico puede operar en todas las condiciones, desde la luz solar hasta la oscuridad total. La tecnología es inmune a la mayoría de las formas de interferencia encontradas en diversos entornos, incluyendo el sonido y la luz, el polvo o el humo.
Esta alternativa ya está siendo usada en drones terrestres para evitar colisiones, así como en tareas de detección del suelo y el techo en drones que vuelan en interiores. Gracias a su pequeño tamaño, bajo consumo y diseño robusto, el ToF por ultrasonidos se puede utilizar en otras aplicaciones.
La plataforma time–of–flight SmartSonic de TDK InvenSense usa el enfoque ultrasónico. La familia SmartSonic consta de sensores de sistemas microelectromecánicos (MEMS) ToF con systems–on–chip (SoC) integrados.
Estos dispositivos son eficientes, ya que consumen hasta cien veces menos de energía que un sensor ToF óptico infrarrojo. De esta forma, permite el uso de la tecnología en aquellas aplicaciones donde el tamaño, el peso y el consumo son aspectos críticos.
Aquí se incluyen sistemas que funcionan con baterías y dispositivos electrónicos remotos que se alimentan con energía “extraída” del entorno.
Las características de ToF por ultrasonidos hacen que sea una buena opción al elegir elementos de detección de objetos y anticolisión en AGV y AMR. No obstante, también se puede utilizar para automatizar otras funciones, como las siguientes:
- Monitorización de objetos en movimiento en una línea de producción
- Detección de envases en máquinas expendedoras y los niveles de líquido en dichos envases a medida que se rellenan o vacían
- Identificación de recubrimiento para el suelo, desde alfombras suaves hasta laminados duros
- Identificación del borde de una superficie, como un escalón
- Detección de velocidad, usando sensores separados para emisión y detección
- Detección de zonas vacías, como plazas libres en sistemas de asistencia de aparcamiento inteligente
La detección de presencia o proximidad es el proceso de identificar cuando algo, normalmente una persona, se aproxima a un dispositivo.
Por ejemplo, el dispositivo podría ser la puerta de un hotel equipada con una cerradura automática. La detección de presencia de ultrabajo consumo puede activar (despertar) el sistema electrónico que consume más energía y que lee una llave electrónica y abre la puerta electromecánicamente.
Minimizar la energía en espera (standby) en sistemas siempre encendidos y listos (always–on, always–ready) es un buen ejemplo de dónde la tecnología ToF ultrasónica aporta valor añadido.
Pero ¿cómo funciona exactamente? Para descubrirlo, echemos un vistazo más de cerca a un sensor ToF por ultrasonidos.
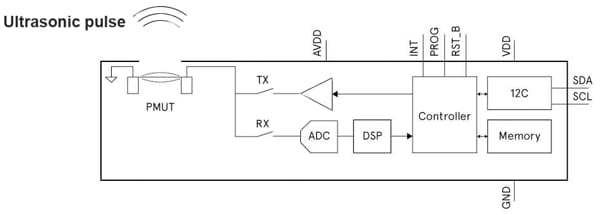
Los sensores están formados por dos bloques funcionales principales. El primero es un transductor ultrasónico micromaquinado piezoeléctrico o PMUT. En una configuración de sensor único, el mismo PMUT se emplea para generar y detectar formas de onda ultrasónicas.
El SoC ofrece la inteligencia necesaria para hacer un buen uso de las capacidades del transductor, incluyendo la generación de la señal impulsora para emitir energía a frecuencias ultrasónicas y detectar y comprender la energía ultrasónica recibida, como reflexiones de objetos en el campo de visión. El SoC integra un procesador de señal digital (DSP) y un microcontrolador (MCU) que ejecuta el firmware proporcionado por TDK InvenSense para alcanzar el procesamiento requerido.
Dos direcciones de interfaz I2C respaldan la comunicación con el sensor. Una de estas direcciones se dedica a la carga del firmware en el DSP y el MCU del sensor en el momento del encendido, en tanto que la otra se utiliza para controlar e interrogar al sensor a través del MCU integrado durante la operación.










